
کنترل کننده PID

کنترل کننده PID
کنترل کننده PID چیست؟ آموزش تعمیر انواع برد های الکترونیکی :تعمیر اینورتر و PLC، تعمیر برد لوازم خانگی ، تعمیر برد تجهیزات پزشکی و… ارائه مدرک فنی و حرفه ای آموزش تعمیر برد توسط دکتر میلاد طاهریان.

برای آموزش تعمیرات تخصصی برد الکترونیک وارد سایت آموزشگاه فنی حرفه ای پاور بشوید و مدرک بین المللی و مدرک فنی و حرفه ای دریافت کنید.آموزش تعمیر برد لیاس شویی ، تعمیر برد ظرف شویی، تعمیر برد ساید ، تعمیر برد یخچال ، تعمیر برد پکیج، تعمیر برد کولر گازی ، تعمیر برد کولر گازی اینورتر ، تعمیر برد لوازم خانگی اینورتر ، تعمیر برد اینورتر، تعمیر برد پی ال سی PLC ،آموزش تعمیر plc . abb
تعمیر برد انکودر، تعمیر برد تجهیزات صنعتی ، تعمیر برد HMI، تعمیر برد پاور ماینر، تعمیر برد ماینر، تعمیر برد ECU ای سی یو ماشین ، تعمیر برد تجخیزات پزشکی، ، تعمیر برد کوادکوپتر ، تعمیر برد هوایما و هلکوپتر ، تعمیر برد رگولاتور ، تعمیر برد الکترونیک
تمامی این موارد در آموزشگاه فنی و حرفه پاور میباشد. آموزشگاه فنی پاور بهترین آموزشگاه تعمیر برد الکترونیک و همچنین برای دانلود آموزش تعمیرات برد PDF و تماشای آموزش رایگان تعمیرات برد وارو سایت آموزشگاه فنی و حرفه ای پاور شوید ، سایت آموزشگاه فنی و حرفه ای تعمیر برد پاور .آموزشگاه فنی و حرفه ای پاور .آموزش تعمیر برد تهران
کنترل کننده PID چیست؟
کنترل کننده PID یک نوع کنترل کننده بازخورد می باشد که برای کنترل سیستمهای دینامیکی استفاده میشود. نام PID مخفف Proportional-Integral-Derivative است که نشان دهنده سه عامل اصلی در این کنترل کننده می باشد.
این سه عامل به شرح زیر عمل میکنند:
- عامل نسبی (Proportional): عامل نسبی با توجه به اختلاف بین مقدار فعلی خروجی سیستم و مقدار مطلوب، یک سیگنال کنترل به صورت مستقیم تولید میکند. این سیگنال کنترل با نسبت مستقیم با خطا تولید میشود، به طوری که با افزایش خطا، سیگنال کنترل نیز افزایش پیدا می کند.
- عامل تجمعی (Integral): عامل تجمعی، خطای گذشته را تجمع میدهد و یک سیگنال کنترل می سازد که به طور مستمر با افزایش زمان افزایش مییابد. این عامل برای حذف خطای ماندگار و استفاده از اصلاحات طولانیمدت دارای کاربرد می باشد.
- عامل اشتقاقی (Derivative): عامل اشتقاقی، نرخ تغییر خطا را محاسبه میکند و یک سیگنال کنترل با نسبت معکوس با سرعت تغییر خطا تولید میکند. این عامل برای پیشبینی رفتار آینده سیستم و جلوگیری از افزایش سرعت تغییر خطا مورد استفاده می باشد.
ترکیب صحیح این سه عامل باعث بهبود عملکرد کنترل کننده میشود. همچنین، پارامترهای مختلفی مانند ضرایب نسبت (proportional gain)، ضرایب تجمع (integral gain) و ضرایب اشتقاق (derivative gain) نیز برای تنظیم کنترل کننده PID استفاده می گردند تا عملکرد بهینه را برای سیستم مورد نظر رقم بزنند.

آموزش رایگان تعمیرات برد در سایت > اینستاگرام > آپارات > یوتیوب آموزشگاه تخصصی تعمیرات برد پاور . آموزش تعمیر بردهای الکترونیکی pdf . آموزش تعمیر برد الکترونیکی رایگان . تعمیر برد الکترونیک .
انواع کنترل کننده PID:
کنترل کننده PID، به عنوان یکی از محبوبترین و پرکاربردترین روشهای کنترل بازخورد، در انواع گوناگونی وجود دارد که به صورت زیر معرفی می گردند:
- کنترل کننده PID با ضرایب زمانی: در این نوع کنترل کننده، وزن زمانی به عامل تجمعی و عامل اشتقاقی اضافه می گردد. این وزن زمانی به صورت یک عامل ضرب در ضریب زمانی در نظر گرفته میشود و به کاهش نوسانات و زمان بهبود در عملکرد کنترل کمک رسان می باشند.
- کنترل کننده PID استاندارد: این نوع کنترل کننده شامل سه عامل اصلی (نسبی، تجمعی و اشتقاقی) است که به صورت خطی کار میکنند. این نوع کنترل کننده برای سیستمهایی که دارای پاسخ دینامیکی ساده و خطی هستند، معمولاً مناسب می باشد.
- کنترل کننده PID با عوامل غیرخطی: در برخی موارد، سیستمها دارای رفتار غیرخطی هستند و استفاده از یک کنترل کننده خطی PID مناسب نیست. در این موارد، می شود از روشهای غیرخطی مانند کنترل کننده PID با عوامل غیرخطی (مانند بازخورد خطی کنترل کننده خطی (LQR) یا کنترل کننده خطی بر اساس مدل (MPC)) استفاده نمود.
علاوه بر این، می شود بر اساس نیازهای خاص سیستم، تغییرات دیگری در کنترل کننده PID ایجاد کرد. به عنوان مثال، اعمال محدودیتها بر روی سیگنال کنترل، استفاده از فیلترهای مقاومتی (anti-windup filters) برای کنترل خطای تجمعی و استفاده از روشهای تنظیم پارامتر بهینه (مانند روش زیگلر-نیکلس (Ziegler-Nichols) و روش تنظیم بهینه مبتنی بر روش گرانبل (Gradient-Based Optimal Tuning))، از جمله تغییراتی می باشند که ممکن است در کنترل کننده PID اعمال گردند.

کاربردهای کنترل کننده PID:
کنترل کننده (PID) به عنوان یکی از روشهای محبوب و قدرتمند در کنترل بازخورد، در بسیاری از صنایع و سیستمها به کار میرود. برخی از کاربردهای قابل توجه کنترل کننده PID عبارتند از:
- رباتیک و خودروهای خودران: در صنعت رباتیک و خودروهای خودران، کنترل کننده PID برای کنترل حرکت، موقعیت و جهت رباتها و خودروها مورد استفاده می باشد. این کنترل کننده باعث استحکام و پایداری حرکت و کاهش زمان واکنش در عملکرد رباتها و خودروها می گردد.
- سیستمهای حرارتی و تهویه: در سیستمهای حرارتی و تهویه (HVAC) مانند سیستمهای گرمایشی، سرمایشی و تهویه مطبوع، کنترل کننده PID برای کنترل دما، رطوبت و سایر پارامترهای محیطی مورد استفاده می باشد. این کنترل کننده باعث کاهش نوسانات دما و رطوبت و حفظ شرایط مطلوب محیطی می گردد.
- سیستمهای الکتریکی و الکترونیکی: در سیستمهای الکتریکی و الکترونیکی، کنترل کننده PID برای کنترل ولتاژ، جریان و سایر ویژگیهای سیستم استفاده میشود. این کنترل کننده باعث بهبود کیفیت و پایداری سیستمهای برقی و الکترونیکی می گردد.
- صنعت فرآیند: در صنایعی مانند پتروشیمی، نفت و گاز، صنعت غذایی و دیگر صنایع فرآیندی، کنترل کننده PID برای کنترل دما، فشار، جریان، سطح و سایر ویژگیهای فرآیند استفاده می گردد. این کنترل کننده بهبود کیفیت و کارایی فرآیند را افزایش میدهد و نوسانات را کاهش خواهد داد.
- صنایع تولیدی: در صنعت های تولیدی مانند ماشینآلات و خطوط تولید، کنترل کننده PID برای کنترل سرعت، موقعیت و کیفیت محصولات مورد استفاده است. این کنترل کننده باعث کاهش خطاها، بهبود کیفیت محصولات و افزایش بهرهوری تولید می گردد.
این فقط چند نمونه از کاربردهای کنترل کننده PID می باشند و در واقع این کنترل کننده در بسیاری از صنعت ها و سیستم ها به کار گرفته می شود. مزیت اصلی استفاده از کنترل کننده PID در این کاربردها، سادگی استفاده، پایداری و عملکرد قابل اعتماد آن می باشد.
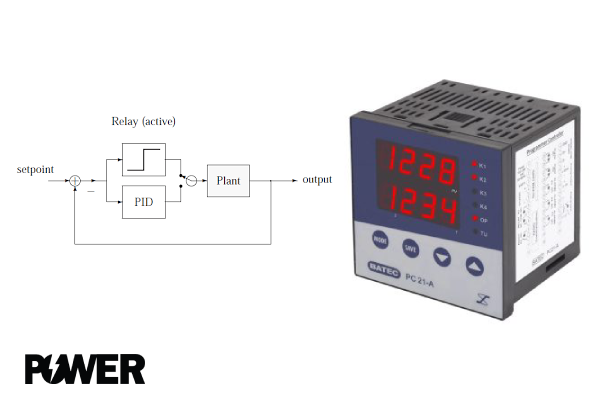
نحوه کارکرد کنترل کننده PID:
- دریافت ورودی: کنترل کننده PID وظیفه دریافت سیگنال ورودی را دارا می باشد. این ورودی ممکن است مقدار مطلوب سیستم کنترلی باشد یا مقدار واقعی سیگنال کنترل که توسط حسگرها اندازهگیری شده می باشد.
- محاسبه خطای کنترل: خطای کنترل تفاوت بین مقدار مطلوب و مقدار واقعی سیگنال کنترل می باشد. این خطا معمولاً با تفاوت دو ورودی مذکور (مقدار مطلوب و مقدار واقعی) محاسبه می گردد.
- عامل نسبی (Proportional): در این مرحله، خطای کنترل ضرب شده توسط ضریب عامل نسبی (Kp) می گردد. خروجی این مرحله نشان دهنده تاثیر عامل نسبی بر کنترل کننده است و مقداری درست در مورد خطای کنترل را نشان میدهد. عامل نسبی معمولاً برای تنظیم سرعت واکنش کنترل کننده و کاهش خطا مورد استفاده می باشد.
- عامل تجمعی (Integral): در این مرحله، خطاهای کنترل قبلی تجمع پیدا می کند و با ضرب آنها در ضریب عامل تجمعی (Ki)، خروجی تولید میشود. عامل تجمعی به کاهش خطای پایا، مانند خطای استاتیک، کمک میکند. این عامل نیز به اصلاح خطا در طولانی مدت و بهبود پایداری سیستم کمک رسان می باشد.
- عامل اشتقاقی (Derivative): در این مرحله، سرعت تغییر خطای کنترل (اشتقاق خطا) با ضرب در ضریب عامل اشتقاقی (Kd) محاسبه میشود. خروجی این مرحله نشان می دهد که سرعت تغییر خطا چقدر می باشد و به کاهش نوسانات و بهبود زمان واکنش به تغییرات سریع خطای کنترل کمک رسان می باشد.
- ترکیب عوامل: در این مرحله، خروجیهای عامل نسبی، عامل تجمعی و عامل اشتقاقی ترکیب می گردند. این ترکیب عملکرد نهایی کنترل کننده PID را تشکیل می دهد. خروجی نهایی کنترل کننده برابر با مجموع خروجی های این سه عامل می باشد.
- اعمال خروجی: خروجی نهایی کنترل کننده PID به عنوان سیگنال کنترلبه سیستم کنترلی اعمال می گردد. این سیگنال کنترل میتواند به یک عنصر اقتصادی مانند موتور، ولو، یا یک پروسه صنعتی دیر اتصال یابد.
- بازخورد و بهبود: پس از اعمال سیگنال کنترل، سیستم کنترلی به وضعیت جدیدی منتقل میشود. حسگرها سیگنال کنترل واقعی را اندازهگیری می نمایند و به کنترل کننده بازخورد میدهند. این بازخورد به کنترل کننده اجازه میدهد تا تغییرات لازم را در سیگنال کنترل اعمال کند تا بهبود و تنظیم بهتری در سیستم کنترلی برقرار گردد.
این مراحل به صورت مکرر و پیوسته انجام می گردند تا کنترل کننده PID بهبود و تغییرات لازم را در سیستم کنترلی اعمال کند و به حداکثر کارایی و دقت برسد. البته، تنظیمات پارامترهای کنترل کننده PID نیز میتواند در طول فرآیند بهبود و تنظیم کنترل کننده تغییر کند.
اجزای کنترل کننده PID:
کنترل کننده PID شامل سه عنصر اصلی می باشد که به صورت ترکیبی با هم، سیگنال کنترلی را تولید میکنند. این سه عنصر عبارتند از:
- عنصر انتگرال (Integral):
این عنصر بر اساس مقدار تجمعی خطای کنترل کار انجام می دهد. با تجمع خطا در طول زمان، مقدار سیگنال کنترلی افزایش پیدا می کند تا خطای استاتیک (ماندگار) را به حداقل برساند. عنصر انتگرال به عنوان پارامتر “Ki” (ضریب انتگرال) در کنترل کننده PID تنظیم می گردد.
- عنصر مضرب مستقیم (Proportional):
این عنصر بر اساس خطای کنترل (اختلاف بین مقدار خروجی سیستم و مقدار مطلوب) عمل میکند. سیگنال کنترلی مستقیماً به نسبت خطای کنترل تولید میشود و مقدار آن با افزایش خطا افزایش یا کاهش پیدا می کند. عنصر مضرب مستقیم به عنوان پارامتر “Kp” (ضریب مضرب مستقیم) در کنترل کننده PID تعیین می گردد.
- عنصر مشتق (Derivative):
این عنصر بر اساس نرخ تغییر خطای کنترل عمل میکند. با تحلیل نرخ تغییر خطا، مقدار سیگنال کنترلی کاهش پیدا می کند تا جلوی تغییرات ناگهانی و پویاییهای سیستم را بگیرد. عنصر مشتق به عنوان پارامتر “Kd” (ضریب مشتق) در کنترل کننده PID تعیین می گردد.
ترکیب این سه عنصر در کنترل کننده PID به شکل زیر انجام گرفته می شود:
سیگنال کنترلی = (Kp * خطای کنترل) + (Ki * تجمع خطای کنترل) + (Kd * نرخ تغییر خطای کنترل)
در این معادله، Kp، Ki و Kd پارامترهای تنظیمپذیر می باشند که با تجربه و تنظیم مناسب آنها، عملکرد کنترل کننده PID بهینه می گردد.
مزایای کنترل کننده PID:
کنترل کننده PID (Proportional-Integral-Derivative) یکی از رایجترین روشهای کنترل استفاده شده در صنعت و کاربردهای مختلف می باشد. این کنترل کننده برخی مزایای مهم را شامل می شود:
- قابلیت تطبیق: کنترل کننده PID به دلیل وجود عامل تجمعی و عامل اشتقاقی، قابلیت تطبیق بهبود یافته را دارد. به این معنی که ممکن است به تغییرات دینامیکی سیستم کنترلی واکنش نشان دهد و به تنظیم بهتری برسد.
- کارایی در کاربردهای وسیع: کنترل کننده PID در بسیاری از صنایع و کاربردهای مختلف مورد استفاده قرار میگیرد. این شامل صنایع مکانیکی، الکترونیکی، پردازش، سیستمهای حرارتی، رباتیک، خودروسازی و غیره می باشد.
- عملکرد خوب در برابر تغییرات سیستم: کنترل کننده PID به خوبی با تغییرات سیستم کنترلی سازگاری دارد. عامل نسبی برای واکنش سریع به تغییرات، عامل تجمعی برای کاهش خطای پایا و عامل اشتقاقی برای کاهش نوسانات و پایداری عملکرد مورد استفاده می باشد.
- پایداری و دقت: کنترل کننده PID بهبود و پایداری برای سیستم کنترلی رقم می زند. با استفاده از تنظیم صحیح پارامترهای PID، می شود دقت بالا در کنترل سیگنال را به دست آورد.
- سادگی و قابلیت پیادهسازی: کنترل کننده PID بسیار ساده و قابلیت پیادهسازی آسانی دارد. تنظیم پارامترهای PID نیز به راحتی قابل درک و انجام می باشد.
- قابلیت تنظیم: پارامترهای عامل نسبی، عامل تجمعی و عامل اشتقاقی در کنترل کننده PID قابل تنظیم هستند. این به کنترل کننده اجازه میدهد تا تناسب و تعادل مناسبی بین سرعت واکنش، کاهش خطا و کنترل نوسانات را به دست آورد.
به طور کلی، کنترل کننده PID به دلیل سادگی، پایداری، دقت و قابلیت تطبیق، یک روش محبوب و قدرتمند برای کنترل سیستمهای فرآیندی و صنعتی می باشد. با این حال، برای برخی از سیستمها و کاربردها، روشهای کنترلی جدیدتر و پیشرفتهتری نیز وجود دارد که ممکن است در موارد خاص بهتر کار انجام دهند.
معایب کنترل کننده PID:
کنترل کننده PID (Proportional-Integral-Derivative) یکی از روشهای محبوب کنترل می باشد که در بسیاری از کاربردها با موفقیت استفاده می گردد. با این حال، برخی معایبی نیز وجود دارد که در زیر توضیح داده میشوند:
- عدم مدلسازی دقیق سیستم: کنترل کننده PID بر پایه فرضیات سادهای مبتنی بر تنظیمات پارامترها عمل میکند و به مدلسازی دقیق سیستم نیازمند نمی باشند. این ممکن است در برخی از سیستمها با پویایی پیچیده و غیرخطی منجر به کارکرد نامطلوب شود. در این موارد، استفاده از روشهای کنترل پیشرفتهتر مانند کنترل کننده فازی یا کنترل کننده مدلمحور ممکن است بهتر عمل کند.
- عدم مقاومت در برابر اغتشاشات: کنترل کننده PID ممکن است به اغتشاشات خارجی حساس باشد و عملکرد آن را تحت تأثیر قرار دهد. این مشکل ممکن است در محیطهای صنعتی با نویز و اغتشاشات بالا یا در حضور اندازهگیری ناصحیح سیگنالها رخ دهد. در چنین مواردی، استفاده از فیلترها یا روشهای کنترل مقاومتتر به اغتشاشات منجر به عملکرد بهتر می گردد.
- حساسیت به تغییرات پارامترهای سیستم: کنترل کننده PID حساسیت بالایی به تغییرات پارامترهای سیستم دارد. تغییرات در پارامترهای سیستم میتوانند باعث ناهمخوانی و عملکرد نامطلوب کنترل کننده گردند. برای مقابله با این مشکل، ممکن است نیاز به تنظیم مجدد پارامترها در طول زمان یا استفاده از روشهای تطبیقی مانند کنترل کننده خودتنظیمشونده (Self-Tuning) باشد.
- نوسانات و زمان پاسخ: استفاده از کنترل کننده PID در برخی موارد ممکن است باعث ایجاد نوسانات و زمان پاسخ طولانی گردد. این ممکن است به دلیل تنظیم غیردقیق پارامترها، نیاز به تنظیم زمانی مناسب برای عاملهای تجمعی و اشتقاقی، یا حساسیت به تغییرات سیستم باشد.
- وابستگی به تنظیم پارامترها: کنترل کننده PID به تنظیم صحیح پارامترهای خود نیاز دارد تا عملکرد بهینه را ارائه کند. این تنظیم پارامترها نیازمند تخصص و تجربه است و ممکن است زمانبر و پیچیده باشد. بدون تنظیم مناسب پارامترها، کنترل کننده ممکن است باعث ناپایداری، نوسانات یا کاهش کارایی گردد.
- عدم قابلیت مقابله با مشکلات غیرخطی: کنترل کننده PID برای سیستمهای با رفتارغیرخطی و پیچیده ممکن است عملکرد نامطلوبی دارا باشد. سیستمهایی که شامل انحرافات بزرگ از خطی بودن یا وجود جوابهای چندگانه هستند، ممکن است به عملکرد نامطلوب کنترل کننده PID منجر شوند. در این موارد، استفاده از روشهای کنترل پیشرفتهتر مانند کنترل کننده مدلمحور، کنترل کننده فازی یا شبکههای عصبی ممکن است بهترین گزینه باشد.
به طور کلی، هرچند کنترل کننده PID در بسیاری از کاربردها موثر می باشد، اما برای برخی موارد خاص، روشهای پیشرفتهتر مانند کنترل کننده مدلمحور، کنترل کننده فازی یا شبکههای عصبی ممکن است بهترین گزینه باشند. همچنین، استفاده از روشهای تطبیقی و خودتنظیمشونده میتواند عملکرد کنترل کننده PID را بهبود دهد.
برای برطرف کردن معایب کنترل کننده PID، میتوانید از روشها و تکنیکهای زیر مورد استفاده قرار دهید:
- استفاده از روشهای کنترل پیشرفتهتر: در برخی موارد، استفاده از روشهای کنترل پیشرفتهتر مانند کنترل کننده مدل محور، کنترل کننده فازی یا شبکههای عصبی این توانایی را دارد و ممکن است که بهبود قابل توجهی در کارایی کنترل داشته باشد. این روشها قادرند با پیچیدگیهای غیرخطی و پویاییهای سیستم بهتر کنار بیایند.
- استفاده از کنترل کننده هجومی (Feedforward): به جای استفاده از کنترل کننده PID به تنهایی، میتوانید از کنترل کننده هجومی نیز مورد استفاده قرار دهید.
- تنظیم مجدد پارامترها در طول زمان: به دلیل تغییرات در پارامترهای سیستم ممکن است لازم باشد پارامترهای کنترل کننده را به طور دورهای تنظیم نمایید. این روش معمولاً با استفاده از الگوریتمهای تطبیقی مانند روشهای خودتنظیمشونده انجام میشود، که به صورت خودکار پارامترها را تنظیم می نمایند.
- تنظیم پارامترها: معایب اولیه کنترل کننده PID ممکن است به تنظیم نادرست پارامترها برگردد. برای بهبود عملکرد، میتوانید از روشهای تجربی مانند روش Ziegler-Nichols استفاده کنید تا پارامترها را بهبود دهید. همچنین، استفاده از روشهای تکنیکی و الگوریتمهای بهینهسازی مانند روش بهینهسازی ژنتیک و بهینهسازی خطی قابل استفاده می باشد.
- استفاده از فیلترها: برای مقابله با اغتشاشات و نویزهای خارجی، میتوانید از فیلترها استفاده کنید. فیلترها میتوانند نویزها را حذف نمایند و عملکرد کنترل را بهبود بخشند. مثلاً میتوان از فیلترهای کالمن یا فیلترهای کالمن-باترورث استفاده نمود.
جهت دیدن دیگر مقالات ما به لینک های زیر مراجعه کنید:




دیدگاهتان را بنویسید